クラスで学んだこと!
「ループ中断条件」と「ブレーキをかけない滑らかな動き」の学習をしました。
まず一つ目の「ループ中断条件」ですが、
繰り返し(ループ)の処理を、ある決められた条件で中断させることができる処理です。
レッスン内ではルンバのようなお掃除ロボをEV3で作成し、
「前に進む→黒いラインを読む→後ろに下がる→方向転換」という一連の動作をループさせ、
タッチセンサーを押したらループが止まるようにしました。
二つ目の「ブレーキをかけない滑らかな動き」についてですが、
これまでに使用してきたステアリングやタンクの設定では、
タイヤの回転ごとにブレーキがかかる仕様になっていました。
そのため、ひとつひとつの動作がカクカクとしてしまいます。
その「ブレーキ」を取り払う方法として、
ステアリングやタンクの「オンモード」+待機ブロックの「モーター回転モード」の組み合わせがあります。
このブレーキをかけない動きを行うことで、
走行タイムの短縮や、わずかな調整が可能になります。

お掃除ロボで円の中のブロックを うまく片付けられるようプログラムしました。
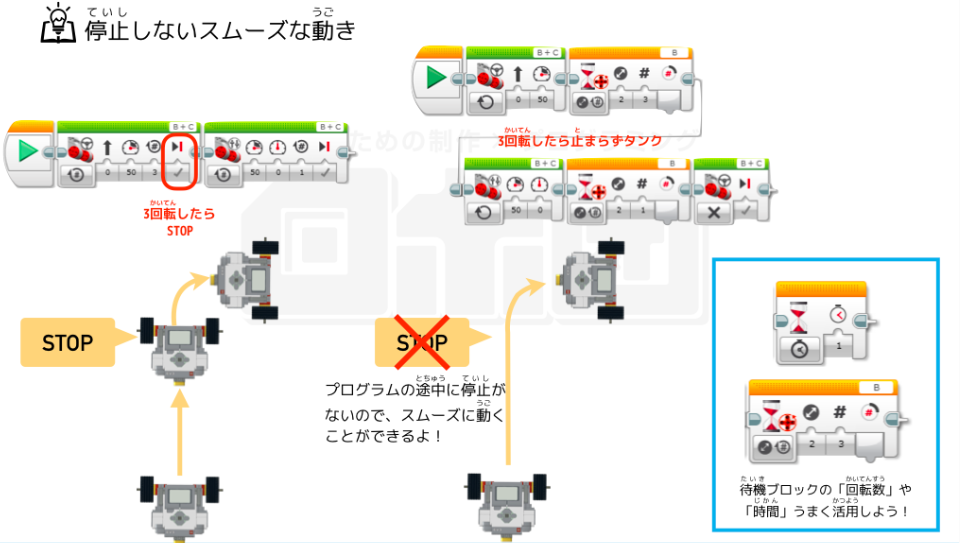
これまで学んできたブレーキがかかってしまうプログラムと、今回学んだブレーキをかけない場合のプログラム比較です。
火星探査機ロボットです!フォークリフトのように
オブジェクトを持ち上げることができます。